আজকাল, রোবটগুলি সর্বত্র রয়েছে বলে মনে হচ্ছে-চলচ্চিত্র, বিমানবন্দর, খাদ্য উত্পাদন এবং এমনকি অন্যান্য রোবট তৈরির কারখানাগুলিতেও কাজ করে। রোবটগুলির অনেকগুলি বিভিন্ন ফাংশন এবং ব্যবহার রয়েছে এবং তাদের উত্পাদন সহজ এবং সস্তা হওয়ার সাথে সাথে তারা শিল্পে আরও বেশি সাধারণ হয়ে উঠছে। রোবোটিক্সের চাহিদা বাড়ার সাথে সাথে রোবট নির্মাতাদের তা ধরে রাখতে হবে এবং রোবট যন্ত্রাংশ তৈরির একটি মৌলিক পদ্ধতি হল CNC মেশিনিং। এই নিবন্ধটি রোবটের মানক অংশ এবং কেন রোবট তৈরির জন্য CNC মেশিনিং এত গুরুত্বপূর্ণ সে সম্পর্কে আরও শিখবে।
সিএনসি মেশিনিং রোবটের জন্য তৈরি
প্রথমত, সিএনসি মেশিনিং অত্যন্ত দ্রুত সীসা সময়ের সাথে অংশ তৈরি করতে পারে। আপনি প্রায় 3D মডেল প্রস্তুত করার পরে, আপনি উপাদান তৈরি করতে CNC মেশিন ব্যবহার শুরু করতে পারেন। এটি প্রোটোটাইপগুলির দ্রুত পুনরাবৃত্তি এবং পেশাদার অ্যাপ্লিকেশনের জন্য কাস্টমাইজড রোবোটিক অংশগুলির দ্রুত বিতরণ সক্ষম করে।
CNC মেশিনিং এর আরেকটি সুবিধা হল যে এটি নির্দিষ্টতা পূরণ করে এমন অংশ সঠিকভাবে তৈরি করতে পারে। এই উত্পাদন নির্ভুলতা রোবোটিক্সের জন্য বিশেষভাবে গুরুত্বপূর্ণ, কারণ মাত্রিক নির্ভুলতা উচ্চ-ক্ষমতা সম্পন্ন রোবট তৈরির চাবিকাঠি। নির্ভুলতা CNC মেশিনিং +/-0.0002 ইঞ্চির মধ্যে সহনশীলতা রাখতে পারে এবং এই অংশটি রোবটকে সুনির্দিষ্ট এবং পুনরাবৃত্তিযোগ্য নড়াচড়া করতে দেয়।
সারফেস ফিনিশ রোবোটিক যন্ত্রাংশ তৈরি করতে CNC মেশিনিং ব্যবহার করার আরেকটি কারণ। মিথস্ক্রিয়াকারী অংশগুলির কম ঘর্ষণ থাকতে হবে। নির্ভুল CNC যন্ত্রাংশ Ra 0.8μm এর মতো কম পৃষ্ঠের রুক্ষতা সহ অংশ তৈরি করতে পারে বা পলিশিংয়ের মতো কাজ শেষ করার পরেও কম। বিপরীতে, ডাই কাস্টিং (যেকোনও ফিনিশিংয়ের আগে) সাধারণত 5¼m এর কাছাকাছি পৃষ্ঠের রুক্ষতা তৈরি করে। মেটাল 3D প্রিন্টিং একটি রুক্ষ পৃষ্ঠ ফিনিস উত্পাদন করবে।
অবশেষে, রোবট দ্বারা ব্যবহৃত উপাদানের ধরন হল CNC মেশিনের জন্য আদর্শ উপাদান। রোবটগুলিকে অবিচ্ছিন্নভাবে বস্তুগুলি সরাতে এবং তুলতে সক্ষম হতে হবে এবং তাদের শক্তিশালী এবং শক্ত উপকরণ প্রয়োজন। এই প্রয়োজনীয় বৈশিষ্ট্যগুলি নির্দিষ্ট ধাতু এবং প্লাস্টিক প্রক্রিয়াকরণের মাধ্যমে সর্বোত্তমভাবে অর্জন করা হয়। এছাড়াও, রোবটগুলি প্রায়শই কাস্টম বা ছোট ব্যাচের উত্পাদনের জন্য ব্যবহৃত হয়, যা CNC মেশিনিংকে রোবট অংশগুলির জন্য একটি প্রাকৃতিক পছন্দ করে তোলে।
CNC মেশিনিং দ্বারা উত্পাদিত রোবট অংশের প্রকার
অনেক সম্ভাব্য ফাংশন সহ, বিভিন্ন ধরণের রোবট বিকশিত হয়েছে। বিভিন্ন প্রধান ধরনের রোবট রয়েছে যা সাধারণত ব্যবহৃত হয়। একটি আর্টিকুলেটেড রোবটের একক বাহুতে একাধিক জয়েন্ট রয়েছে, যা অনেকেই দেখেছেন। এছাড়াও একটি SCARA (সিলেক্টিভ কমপ্লায়েন্স আর্টিকুলেটেড রোবট আর্ম) রোবট রয়েছে, যা দুটি সমান্তরাল প্লেনের মধ্যে জিনিসগুলিকে সরাতে পারে। SCARA এর একটি উচ্চ উল্লম্ব দৃঢ়তা রয়েছে কারণ তাদের চলাচল অনুভূমিক। ডেল্টা রোবটের জয়েন্টগুলি নীচে অবস্থিত, যা বাহুগুলিকে হালকা রাখে এবং দ্রুত নড়াচড়া করতে সক্ষম। অবশেষে, গ্যান্ট্রি বা কার্টেসিয়ান রোবটগুলিতে লিনিয়ার অ্যাকচুয়েটর থাকে যা একে অপরের কাছে 90 ডিগ্রি সরে যায়। এই রোবটগুলির প্রতিটির একটি আলাদা কাঠামো এবং বিভিন্ন অ্যাপ্লিকেশন রয়েছে, তবে সাধারণত পাঁচটি প্রধান উপাদান থাকে যা রোবট তৈরি করে।
সাধারণত বিভিন্ন ধরনের রোবট ব্যবহার করা হয়। একটি আর্টিকুলেটেড রোবটের একক বাহুতে একাধিক জয়েন্ট রয়েছে, যা অনেকেই দেখেছেন। এছাড়াও একটি SCARA (সিলেক্টিভ কমপ্লায়েন্ট জয়েন্ট রোবট আর্ম) রোবট রয়েছে যা দুটি সমান্তরাল প্লেনের মধ্যে বস্তুগুলিকে সরাতে পারে। SCARA এর একটি উচ্চ উল্লম্ব দৃঢ়তা রয়েছে কারণ তাদের চলাচল অনুভূমিক। ডেল্টা রোবটের জয়েন্টগুলি বেসে অবস্থিত, যা বাহুগুলিকে হালকা রাখে এবং দ্রুত নড়াচড়া করতে সক্ষম। অবশেষে, গ্যান্ট্রি বা কার্টেসিয়ান রোবটগুলিতে লিনিয়ার অ্যাকচুয়েটর থাকে যা একে অপরের কাছে 90 ডিগ্রি সরে যায়। এই রোবটগুলির প্রত্যেকটির আলাদা কাঠামো এবং বিভিন্ন অ্যাপ্লিকেশন রয়েছে, তবে সাধারণত 5টি প্রধান উপাদান থাকে:
1. রোবোটিক বাহু
রোবট অস্ত্র ফর্ম এবং ফাংশন খুব ভিন্ন, তাই অনেক বিভিন্ন অংশ ব্যবহার করা হয়. যাইহোক, তাদের মধ্যে একটি জিনিস মিল রয়েছে, তা হল, তারা বস্তুগুলিকে নড়াচড়া করতে বা পরিচালনা করতে পারে-এটি মানুষের হাত থেকে আলাদা নয়! রোবট বাহুর বিভিন্ন অংশ এমনকি আমাদের নিজস্ব অংশের নামে নামকরণ করা হয়েছে: কাঁধ, কনুই এবং কব্জির জয়েন্টগুলি ঘোরে এবং প্রতিটি অংশের গতিবিধি নিয়ন্ত্রণ করে।

2. শেষ প্রভাবক
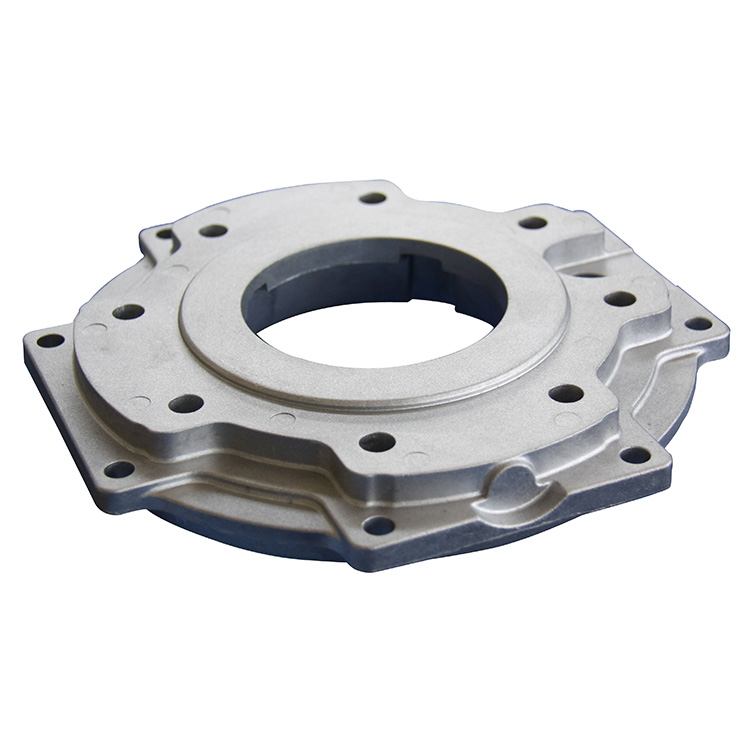
এন্ড ইফেক্টর হল একটি আনুষঙ্গিক জিনিস যা রোবট হাতের শেষের সাথে সংযুক্ত থাকে। এন্ড ইফেক্টর আপনাকে একেবারে নতুন রোবট তৈরি না করেই বিভিন্ন অপারেশন অনুযায়ী রোবটের ফাংশন কাস্টমাইজ করতে দেয়। এগুলি গ্রিপার, গ্র্যাবার, ভ্যাকুয়াম ক্লিনার বা সাকশন কাপ হতে পারে। এই শেষ প্রভাবকগুলি সাধারণত ধাতু (সাধারণত অ্যালুমিনিয়াম) দিয়ে তৈরি CNC মেশিনযুক্ত অংশ। একটি উপাদান রোবট হাতের শেষের সাথে স্থায়ীভাবে সংযুক্ত থাকে। প্রকৃত গ্রিপার, সাকশন কাপ বা অন্যান্য শেষ ইফেক্টর এই সমাবেশের সাথে মিলে যায় তাই এটি রোবট আর্ম দ্বারা নিয়ন্ত্রিত হতে পারে। দুটি ভিন্ন উপাদান সহ এই সেটআপটি বিভিন্ন এন্ড ইফেক্টর প্রতিস্থাপন করা সহজ করে তোলে, তাই রোবটটিকে বিভিন্ন অ্যাপ্লিকেশনের সাথে মানিয়ে নেওয়া যায়। আপনি নীচের ছবিতে এটি দেখতে পারেন. নীচের ডিস্কটি রোবটের হাতের সাথে বোল্ট করা হবে, যা আপনাকে রোবটের এয়ার সাপ্লাই ডিভাইসের সাথে সাকশন কাপ পরিচালনাকারী পায়ের পাতার মোজাবিশেষ সংযোগ করতে দেয়। উপরের এবং নীচের ডিস্কগুলি CNC মেশিনযুক্ত অংশগুলির উদাহরণ।

(শেষ প্রভাবক অনেক CNC মেশিন অংশ জড়িত)
3. মোটর
প্রতিটি রোবটের অস্ত্র এবং জয়েন্টগুলির নড়াচড়া চালানোর জন্য একটি মোটর প্রয়োজন। মোটরের নিজেই অনেকগুলি চলমান অংশ রয়েছে, যার মধ্যে অনেকগুলি সিএনসি দ্বারা প্রক্রিয়া করা যেতে পারে। সাধারণভাবে বলতে গেলে, মোটরটি শক্তির উত্স হিসাবে কিছু ধরণের মেশিনযুক্ত হাউজিং ব্যবহার করে এবং একটি মেশিনযুক্ত বন্ধনী যা এটিকে রোবোটিক হাতের সাথে সংযুক্ত করে। বিয়ারিং এবং শ্যাফ্টগুলি সাধারণত সিএনসি মেশিনযুক্ত হয়। ব্যাস কমানোর জন্য শ্যাফ্টটিকে লেদ দিয়ে মেশিন করা যেতে পারে, অথবা চাবি বা খাঁজের মতো বৈশিষ্ট্য যুক্ত করতে এটি একটি মিলিং মেশিনে মেশিন করা যেতে পারে। অবশেষে, রোবটের জয়েন্ট বা অন্যান্য গিয়ারে মোটর গতি স্থানান্তর করতে মিলিং, ইডিএম বা গিয়ার হবিং ব্যবহার করা যেতে পারে।
4. কন্ট্রোলার
নিয়ন্ত্রক মূলত রোবটের মস্তিষ্ক, যা রোবটের সুনির্দিষ্ট গতিবিধি নিয়ন্ত্রণ করে। রোবটের কম্পিউটার হিসাবে, এটি সেন্সর ইনপুট গ্রহণ করে এবং আউটপুট নিয়ন্ত্রণ করে এমন প্রোগ্রামটি পরিবর্তন করে। এর জন্য ইলেকট্রনিক যন্ত্রাংশ রাখার জন্য একটি প্রিন্টেড সার্কিট বোর্ড (PCB) প্রয়োজন। ইলেকট্রনিক উপাদান যোগ করার আগে, PCB প্রয়োজনীয় আকার এবং আকৃতি অর্জন করতে CNC প্রক্রিয়া করা যেতে পারে।
5. সেন্সর
উপরে উল্লিখিত হিসাবে, সেন্সরটি রোবটের আশেপাশের পরিবেশ সম্পর্কে তথ্য গ্রহণ করে এবং রোবট নিয়ন্ত্রকের কাছে তা ফেরত দেয়। সেন্সরটিরও একটি PCB প্রয়োজন, যা CNC দ্বারা প্রক্রিয়া করা যেতে পারে। কখনও কখনও, এই সেন্সরগুলি CNC মেশিনযুক্ত হাউজিংগুলিতেও ইনস্টল করা হয়।
6. কাস্টম ফিক্সচার এবং স্থির ডিভাইস।
যদিও রোবট নিজেই অংশ নয়, বেশিরভাগ রোবট অপারেশনের জন্য কাস্টম ফিক্সচার এবং ফিক্সড ডিভাইসের প্রয়োজন হয়। যখন রোবটটি অংশে কাজ করছে, তখন অংশটি ঠিক করার জন্য আপনার একটি ফিক্সচারের প্রয়োজন হতে পারে। আপনি অংশগুলিকে সঠিকভাবে অবস্থান করার জন্য ফিক্সচারগুলি ব্যবহার করতে পারেন, যা সাধারণত রোবটগুলির অংশগুলি বাছাই বা নীচে রাখার জন্য প্রয়োজনীয়। কারণ তারা সাধারণত এক-অফ কাস্টমাইজড অংশ, সিএনসি মেশিনিং ফিক্সচারের জন্য খুব উপযুক্ত।
---------------------------------------শেষ---------- --------------------------------------------------